北京工业大学机械设计试题1及答案解析
VIP免费

一、填空(每空 1分)
T-1-1-01-2-3、构件是机器的 运动 单元体;零件是机器的 制造 单元体;部件是机器
的 装配 单元体。
T-2-2-02-2-4、平面运动副可分为 低副 和 高副 ,低副又可分为 转动副 和 移动
副 。
T-2-2-03-2-2、运动副是使两构件接触,同时又具有确定相对运动的一种联接。平面运动副
可分为 低副和 高副 。
T-2-2-04-2-1、平面运动副的最大约束数为 2 。
T-2-2-05-2-1、机构具有确定相对运动的条件是机构的自由度数目 等于 主动件数目。
T-2-2-06-2-1、在机构中采用虚约束的目的是为了改善机构的 工作情况和 受力情况 。
T-2-2-07-2-1、平面机构中,两构件通过点、线接触而构成的运动副称为 高副 。
T-3-2-08-2-2、机构处于压力角 α=90°时的位置,称机构的死点位置。曲柄摇杆机构,当曲
柄为原动件时,机构 无 死点位置,而当摇杆为原动件时,机构 有 死点位置。
T-3-2-09-2-2、铰链四杆机构的死点位置发生在从动件与连杆 共线 位置。
T-3-2-10-2-1、在曲柄摇杆机构中,当曲柄等速转动时,摇杆往复摆动的平均速度不同的运
动特性称为: 急回特性 。
T-3-2-11-2-1、摆动导杆机构的极位夹角与导杆摆角的关系为 相等 。
T-4-2-12-2-3、凸轮机构是由 机架、凸轮、从动件 三个基本构件组成的。
T-5-1-13-2-1、螺旋机构的工作原理是将螺旋运动转化为 直线 运动。
T-6-2-14-2-1、为保证带传动的工作能力,一般规定小带轮的包角 α≥120°。
T-6-7-15-2-3、链传动是由 主动链轮 、从动链轮 、绕链轮上链条 所组成。
T-6-7-16-2-3、链传动和带传动都属于 挠性件 传动。
T-7-2-17-3-6、齿轮啮合时,当主动齿轮的 齿根_推动从动齿轮的 齿顶 ,一对轮齿开始
进入啮合,所以开始啮合点应为从动轮 齿顶圆 与啮合线的交点;当主动齿轮的 齿顶
推动从动齿轮的 齿根 ,两轮齿即将脱离啮合,所以终止啮合点为主动轮 齿顶圆 与
啮合线的交点。
T-7-3-18-2-2、渐开线标准直齿圆柱齿轮正确啮合的条件为 模数 和 压力角 分别相等。
T-7-2-19-3-2、_齿面磨损__和_因磨损导致的轮齿折断__是开式齿轮传动的主要失效形式。
T-7-2-20-2-2、渐开线齿形常用的加工方法有 仿形法 和 范成法 两类。
T-7-2-21-2-2、在一对齿轮啮合时,其大小齿轮接触应力值的关系是 σH1 = σH2。
T-7-10-22-2-2、斜齿圆柱齿轮的重合度 大于 直齿圆柱齿轮的重合度,所以斜齿轮传动平
稳,承载能力 高 ,可用于高速重载的场合。
T-8-2-23-2-3、在蜗轮齿数不变的情况下,蜗杆的头数 越少 ,则传动比就越大。
T-8-2-24-2-3、蜗杆传动的中间平面是指:通过_蜗杆_轴线并垂直于__蜗轮__轴线的平面。
T-8-2-25-2-3、普通圆柱蜗杆和蜗轮传动的正确啮合条件是_ ma1=mt2、αa1=αt2、λ=β_。
T-10-2-26-2-3、若键的标记为键 C20×70GB1096-79,则该键为 C
型平键,b=20,L=70。
T-10-1-27-2-2、轮系运动时,所有齿轮几何轴线都固定不动的,称定轴轮系轮系,至少有一
个齿轮几何轴线不固定的,称 周转星轮 系。
T-11-2-28-2-3、轴的作用是支承轴上的旋转零件,传递运动和转矩,按轴的承载情况不同,
可以分为 转轴、心轴、传动轴 。
T-10-1-29-2-3、机械静联接又可以分为 可拆 联接和 不可拆 联接,其中键联接、螺纹
联接、销联接属于 可拆 连接。
T-10-2-30-2-3、.螺纹联接防松的目的是防止螺纹副的相对运动,按工作原理的不同有三种
防松方式: 摩擦力 防松、 机械 防松、 其它方法 防松。

相关推荐
-
北京工业大学812材料力学2021年真题VIP专享
 2025-12-29 999+
2025-12-29 999+ -
北京工业大学812材料力学2022年真题VIP专享
 2025-12-29 999+
2025-12-29 999+ -
北京工业大学822信息与系统2021年真题答案VIP专享
 2025-12-29 999+
2025-12-29 999+ -
北京工业大学822信息与系统2022年真题VIP专享
 2025-12-29 999+
2025-12-29 999+ -
兰州大学803半导体物理(含晶体管原理)大学2017年真题VIP免费
 2025-12-31 999+
2025-12-31 999+ -
长安大学838材料科学基础课后习题答案VIP免费
 2026-01-13 999+
2026-01-13 999+ -
中南大学940电路理论2010年考研真题答案手写版VIP免费
 2026-02-02 999+
2026-02-02 999+ -
暨南大学823电子技术基础2017年真题答案VIP免费
 2026-02-02 999+
2026-02-02 999+ -
暨南大学823电子技术基础2015年真题答案VIP免费
 2026-02-02 999+
2026-02-02 999+ -
暨南大学823电子技术基础2014年真题VIP免费
 2026-02-02 999+
2026-02-02 999+
作者:清悠学姐
分类:考研考博类
价格:1知币
属性:14 页
大小:388.32KB
格式:DOCX
时间:2025-12-31
相关内容
-
清华大学827电路原理2008年真题答案
分类:考研考博类
时间:2026-02-26
标签:清华大学
格式:PDF
价格:免费
-
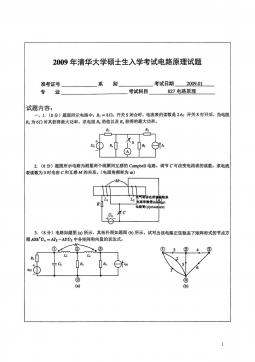
清华大学827电路原理2009年真题
分类:考研考博类
时间:2026-02-26
标签:清华大学
格式:PDF
价格:免费
-

清华大学827电路原理2009年真题答案
分类:考研考博类
时间:2026-02-26
标签:清华大学
格式:PDF
价格:免费
-
山西大学844环境保护概论全套纸质版资料
分类:考研考博类
时间:2026-05-14
标签:山大
格式:纸质资料
价格:210 知币
-
山西大学856工程光学全套纸质版资料
分类:考研考博类
时间:2026-05-20
标签:山大
格式:纸质资料
价格:210 知币